: 4 koraki (s slikami)")
Kazalo:
- Avtor John Day day@howwhatproduce.com.
- Public 2024-01-30 12:06.
- Nazadnje spremenjeno 2025-01-23 15:09.
")
")
S svojim pametnim telefonom sem želel nadzorovati svoj mikrokontroler za notranje prostore, vendar nisem našel dobre rešitve za to. Okrog sem imel položenih nekaj WiFi modulov ESP8266, zato sem se odločil, da si naredim svojega.
Program zažene dostopno točko wifi s spletnim mestom HTML 5 za nadzor signala PPM. PPM signal nastane s prekinitvijo.
Zahvaljujoč HTML5 lahko upravljate svojo napravo RC s katerim koli pametnim telefonom brez aplikacije.
Na spletno mesto se lahko povežete tudi z osebnim računalnikom in za krmiljenje uporabite krmilno palčko. Trenutno to deluje samo v Firefoxu.
V tem nerazumljivem bom razložil, kako nastaviti ESP8266 in kako sprejeti sprejemnik v Betaflight -u.
1. korak: Seznam delov

Začnimo s seznamom delov. Potrebujete le nekaj komponent:
- ESP8266: Vsak modul bi moral delovati. Uporabljam modul ESP 12-F:
- 3, 3V pretvornik USB v zaporedni za prvi prenos naboja. (Po prvem nalaganju lahko uporabite posodobitev OTA). Uporabite nekaj takega:
- 3, 3V regulator napetosti: ESP8266 potrebuje 3, 3V. Vsaka napetost nad 3, 6V bo ubila napravo. Prav tako lahko pade približno 200mA največji tok. Če pri modelu RC nimate dovolj močnega napajanja 3, 3V, potrebujete dodaten regulator napetosti. Ta regulator navzdol uporabljam z uporom 3, 9K Ohm:
- računalnik z Arduino IDE:
- Podpora ESP8266 za Arduino IDE. Sledite tem navodilom:
- Knjižnica Websocket za Arduino:
- Mogoče 3, 3V/5V nivojski menjalnik, če vaš dekodirnik PPM ne podpira 3, 3V vhodov. Za večino krmilnikov letenja s kvadrokopterjem tega ne potrebujete.
- Načrt WifiPPM: spodaj prenesite datoteko ali
- Pametni telefon ali računalnik z igralno palico in Firefoxom
2. korak: Nastavite elektroniko in naložite program

Najprej morate nastaviti napajalne povezave na ESP8266. Na sliki lahko vidite ožičenje. Vzpostavite naslednje povezave:
RST, EN in VCC na 3, 3V
GPIO15 in GND v GND
Med VCC in GND postavite majhen kondenzator (približno 100 nF)
TXD v RXD vaše serijske naprave USB2
RXD v TXD vaše serijske naprave USB2
Za vklop načina bliskavice nastavite GPIO0 na GND.
Ko namestite Arduino IDE, podpora ESP8266 in knjižnica websocket odpreta skico. Držite GIO0 na GND, medtem ko vklopite ESP8266 za vstop v način bliskavice. Zdaj lahko naložite skico.
Ko naložite skico, se bo krmilnik ponastavil. Morali bi najti dostopno točko WIFI z imenom WifiPPM. Če je to v redu, lahko izklopite čip in odklopite žice TXD, RXD in GPIO0. V prihodnosti lahko program posodobite prek OTA. To storite tako, da se povežete z dostopno točko in v spletnem brskalniku odprete »192.168.1.4/update«.
3. korak: Spletno mesto


Zdaj lahko priključite GPIO5 na vhod PPM vašega krmilnika leta ali karkoli drugega, kar uporabljate za dekodiranje signala PPM.
Po vklopu modula se lahko povežete z dostopno točko "WifiPPM". Gesla ni. V brskalniku odprite naslov 192.168.4.1.
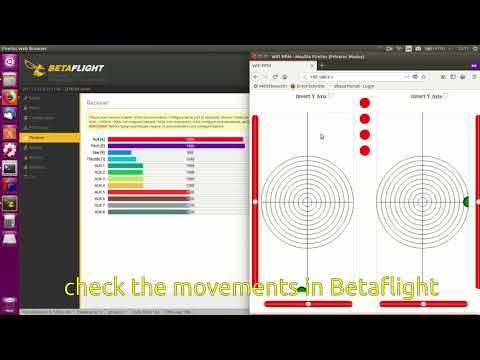
Videli boste spletno mesto prve slike. Na napravi na dotik lahko upravljate palice z zaslonom na dotik.
Če spletno mesto odprete z osebnim računalnikom, morate uporabiti Firefox. Takoj, ko povežete igralno palico, se bo stran spremenila v tisto, ki jo vidite na drugi sliki. S palicami lahko upravljate s krmilno palčko.
V naslednjem koraku bom razložil, kako nastaviti Betaflight, ker ga uporabljam. Če uporabljate kakšen drug krmilnik, se morate od zdaj naprej lotiti sami.
4. korak: Nastavitev Betaflight
Krmilnik WifiPPM uporabljam za svoj quadcopter z Betaflight. Zdaj pojasnjujem, kako ga nastaviti.
- Povežite krmilnik leta z računalnikom
- odprite Betaflight
- povežite se z kontrolorjem leta
- pojdite na zavihek Sprejemnik
- v polje zemljevid kanala vnesite RTAE1234
- spremenite "Stick Low Threshold" na 1020, "Stick Center" na 1500 in "Stick High Threshold" na 1980
- shranite spremembe
- odprite spletno mesto wifiPPM s svojim mobilnim telefonom in preizkusite, ali je nastavitev v redu
To je to. Končali ste. Zdaj lahko letite s svojim mobilnim telefonom brez dodatne aplikacije.
Priporočena:
Neoboard svetilka - SD ni potrebna in 3D natisnjena: 3 koraki (s slikami)
")
Neoboard svetilka - SD ni potrebna in 3D natisnjena: Po izdelavi svetilke Minecraft za mojega 7 -letnega otroka je njegov mlajši brat želel nekaj podobnega. Bolj se ukvarja s SuperMariom kot z Minecraftom, zato bo njegova nočna luč pokazala sprite videoigre. Ta projekt temelji na projektu Neoboard, vendar pa
Pametni dom z Arduino MKR1000 in M.I.T. Aplikacija za Android: 4 koraki

Pametni dom z Arduino MKR1000 in M.I.T. Aplikacija za Android: V tej vadnici opisujem, kako izboljšati svoj pametni dom z le nekaj komponentami. Srce te zasnove pametnega doma je plošča Arduino MKR1000, krmiljena z aplikacijo, zasnovano na razvojni spletni strani M.I.T. (Inštitut Massachusetts
ESP32-CAM Zajemite fotografije in jih pošljite po e-pošti s pomočjo SPIFF Memmory. -- NI potrebna kartica SD: 4 koraki

ESP32-CAM Zajemite fotografije in jih pošljite po e-pošti s pomočjo SPIFF Memmory. || NE potrebujete kartice SD: Pozdravljeni, plošča ESP32-CAM je poceni razvojna plošča, ki združuje čip ESP32-S, kamero OV2640, več GPIO-jev za povezavo zunanjih naprav in režo za kartico microSD. Ima številne aplikacije, od spletnega strežnika za pretakanje videov,
Domača aplikacija z daljinskim upravljanjem s pomnilniško funkcijo: 4 koraki

Domača aplikacija z daljinskim upravljanjem s pomnilniško funkcijo: z uporabo tega vezja lahko upravljamo 4 releje z daljinskim upravljalnikom in z uporabo funkcije eeprom si zapomnimo zadnje stanje relejev tudi med izgubo energije
Walking Strandbeest, Java/Python in aplikacija, nadzorovana: 4 koraki (s slikami)
")
Walking Strandbeest, Java/Python in App Controlled: Ta komplet Strandbeest je DIY delo, ki temelji na Strandbeestu, ki ga je izumil Theo Jansen. Presenečen nad genialno mehansko zasnovo, ga želim opremiti s popolno okretnostjo, nato pa še računalniško inteligenco. V tem navodilu delamo na prvem