")
Kazalo:
- Avtor John Day day@howwhatproduce.com.
- Public 2024-01-30 12:04.
- Nazadnje spremenjeno 2025-01-23 15:08.



Zdravo fantje..
Ste se kdaj sprehajali, da bi naredili labirintno ploščo, ki bi jo lahko upravljali s pametnega telefona Android…!
Pa ste na pravem mestu. Enega sem si zgradil z Arduinom in androidom.
Ne skrbite, da je lahko … V tem projektu vam bom pokazal, kako narediti:
1. Labirintna deska (naredila sem jo iz starih lesenih škatel, ki so ležale naokoli).
2. Aplikacija Android v izumitelju aplikacij za nadzor plošče.
3. Pisanje programa v Arduinu za nadzor odbora in
4. Nastavitev vezja….
Kasneje lahko uporabite koncept, naučen v drugih projektih, ki jih boste zgradili.
Torej, brez zapravljanja časa, začnimo….!
1. korak: Zbiranje komponent



Za ta projekt boste potrebovali naslednje elemente:
1. Dva servo motorja (uporabil sem mini in so delali zame).
2. Arduino Uno. (Predlagam, da ga kupite pri snapdealu, je njegov klon, vendar je vreden vsakega denarja, ki sem ga porabil)
3. Modul Bluetooth.
4. Breadboard.
5. Nekaj mostičnih žic
6. Tanke lesene ali trde plošče
7. žeblji, nekaj ključnih palic iz starih tipkovnic
8. Termokol (polistiren)
2. korak: Izdelava labirintne deske



To je mehanski del projekta.
Najprej za podlago vzemite dolg pravokoten kos lesene deske ali kartona. mora biti večja od dejanske nagibne deske..
Odrežite dva majhna kvadratastega lesa enake velikosti.
in vsakemu dodajte en žebelj, tako da sta alinska na isti višini od podlage. Odrežite tudi dodaten kos lesa, da ga dodate kot oporo stebrom.
zdaj za zgornjo desko..
naredite okvir manjši od osnove, to bo naša os x, na zunanji strani manjših robov okvirja naredite majhne luknje točno na sredini robov. prerežite palice na polovico in jih prilepite na velike robove okvirja, obrnjene navznoter. jih pred tem prerežite na pol.
to bo držalo zgornjo ploščo za okvir in pomagalo pri vrtenju.
zdaj dodajte stebre v zunanje luknje, da okvir stoji na dnu.
stebre prilepite na podlago in nanje pritrdite tudi nosilce.
zdaj dodam še servo motorje.
ena bo pritrjena na podlago in bo pritrjena na okvir z majhno palico za zasukanje okvirja
druga bo pritrjena na okvir in bo pritrjena na zgornjo ploščo z majhno palico za vrtenje zgornje deske.
servomotorji morajo biti nameščeni pravokotno drug na drugega, kot je prikazano na slikah.
zdaj je plošča pripravljena.
labirint sem naredil s termokolom in kartonom.
3. korak: Nastavitev vezja

Nastavite vezje, kot je prikazano na sliki…
Za servomotorje uporabljam rdečo žico pozitivno, rjavo negativno in oranžno signal.
Bluetooth modul
Rx gre na pin 1
Tx gre na pin 0
Signalna žica osnovnega servomotorja gre na pin 5
Signalna žica servo pogona gre na pin 6
Ne pozabite dodati dodatnega napajanja za servo in bluetooth modul. Drugi modri modul ne bo dobil dovolj toka in se bo še naprej odklopil, kar kaže na napako 516. Imel sem veliko težav pri odpravljanju in končno ugotovil težavo in rešitev.
4. korak: Ustvarjanje aplikacije


V redu, najprej se morate prijaviti v izumitelja aplikacij mit za izdelavo kakršnih koli aplikacij.
pojdite na
in kliknite Ustvari aplikacijo! ki se v zgornjem desnem kotu prijavite, in pripravljeni ste iti….
Vse ostalo, kar sem pokazal v videu, poglejte.
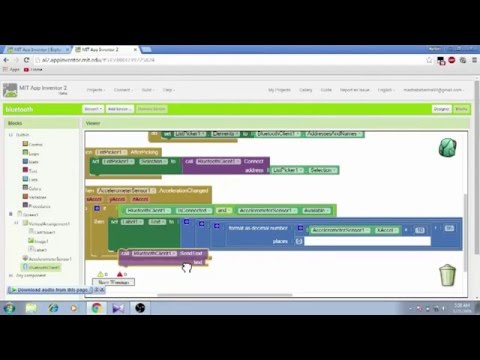
tukaj osnovno:
ko je zaslon inicializiran v aplikaciji (kar je v tem primeru Screen1), -senzor merilnika pospeška je omogočen, občutljivost pa nastavljena na največ, tj.
zdaj, ko pritisnemo izbirnik seznamov
-pojavi se seznam, v katerem so navedene seznanjene naprave.
(modul boste morali seznaniti, preden odprete aplikacijo, saj je koda za par običajno 1234)
Zdaj, preden izberete izbirnik seznamov, -nastavite seznam s seznanjenimi napravami in njihovimi naslovi
Ko izberete napravo
-adapter Bluetooth se bo povezal z izbrano napravo
Zdaj je modul priključen
Zdaj, ko se spremenijo podatki aklerometraSensor
-Dodajte podatke v besedilo nalepke in jih pošljite z bluetooth send.
Zdaj težaven del pošilja oba podatka hkrati
# podatki aklerometra segajo od 0 do 9,5 pri nagibu levo in od 0 do -9,5 pri nagibu v desno, enako velja, ko je telefon nagnjen spodaj in navzgor.
torej imamo podatke o nagibu osi x in y, ki jih moramo poslati …
naj bodo podatki osi x X in y osi Y
torej sem naredil tole:
Besedilo = "(X*10 (po tem odstranite decimalna mesta) +95)*1000 (pomnožite s 1000)+Y*10 (odstranite decimalna mesta) +95"
tako da se podatki zdaj gibljejo od 0 do 190 za vsako os in se dodajo v 190180, kjer so prve 3 številke os x, zadnje 3 pa koordinate osi y …
ki bo poslan v modul bluetooth in bo razčlenjen na dejanske podatke in zemljevid s koti vrtenja servo v kodi arduino …
5. korak: Pisanje kode Arduino


Ko je aplikacija dokončana, začnimo s kodo, ki sem jo naložil, jo prenesite, sestavite in pošljite na arduino, vendar počakajte, preden pošljete kodo, odstranite zatiče rx in tx modula bluettoh z plošče arduino.. in pošljite kodo po tem lahko pritrdite zatiče nazaj..
koda, ki jo prejmemo prek bluetootha, je niz, ki vsebuje podatke o osi.
zdaj Serial.parseInt (); se uporablja za branje niza in pretvorbo niza v int v spremenljivki poz.
zdaj ima vrednost = 190180 (recimo) naš cilj je zdaj dešifrirati podatke, tj. odstraniti os x in koordinate y
za os x. delite vrednost s 1000, to bo dalo vrednost 190. tj./1000 = 190
in za os y modularno delite vrednost s 1000, kar nam bo dalo 180, tj. vrednost%1000 = 180
zdaj izračunajte največji in najmanjši položaj servomotorjev, ki jih želite za nagibanje plošče,… v mojem primeru 180 in 75 in….
zdaj imamo koordinirano os x in y, zdaj moramo samo preslikati koordinate z najmanjšim in največjim kotom vrtenja, ki ju želimo za naše servomotorje.
za podrobnosti glej kodo.
In končali smo … naložite kodo, odprite aplikacijo Connect and play….
Ali veste, da je Google naredil enega zase in je zelo velik labirint, ki ste ga kdaj videli … kar je tudi moja motivacija, da si ga zgradim.
Zato se do naslednjič lepo imejte..
Priporočena:
Pritisnite (Gumb); // Arduino LCD igra: 5 korakov (s slikami)
; // Arduino LCD igra: 5 korakov (s slikami)")
Pritisnite (Gumb); // Arduino LCD igra: Pred kratkim sem v skavtih delal na znački zasluge za oblikovanje igre. Za eno od zahtev sem to igro zgradil z uporabo Arduina, ki temelji na igri LED Rocker. Bistvo igre je doseči čim večjo količino točk. Na začetku t
Igra Arduino Wire: 7 korakov (s slikami)
")
Arduino Wire Game: Za ta projekt sem se skliceval na to spletno mesto in ga spremenil v nov projekt. Ta projekt se imenuje Wire Game, kjer boste vzeli kovinski ročaj in ga naredili skozi žico, ne da bi se dotaknili žice. Če se ročaj dotakne žice
Arduino Touch Tic Tac Toe Igra: 6 korakov (s slikami)
")
Arduino Touch Tic Tac Toe Game: Dragi prijatelji, dobrodošli v drugi Arduino vadnici! V tej podrobni vadnici bomo zgradili igro Arduino Tic Tac Toe. Kot vidite, uporabljamo zaslon na dotik in igramo proti računalniku. Preprosta igra, kot je Tic Tac Toe, je
Arduino Pinball Machine, ki se igra sam !: 13 korakov (s slikami)
")
Arduino fliper, ki se igra sam !: " Stroj za fliper, ki se igra sam, ali mu to ne vzame vsega užitka? &Quot; Slišim, da sprašujete. Morda, če se ne ukvarjate z avtonomnimi roboti. Jaz pa se zelo ukvarjam z izdelavo robotov, ki zmorejo kul stvari, in ta
Arduino ciklonska igra: 5 korakov (s slikami)
")
Arduino Cyclone Game: Nikoli nisem igral prave ciklonske arkadne igre, vendar mi je všeč ideja, da se igram z našim reakcijskim časom. Oblikoval sem miniaturno igro. Sestavljen je iz 32 LED, ki tvorijo krog, LED svetijo ena za drugo kot lovilka LED. Cilj je pritisniti gumb