![[vPython] Spider Robot Simulator: 4 koraki](https://i.howwhatproduce.com/images/003/image-8663-22-j.webp "[vPython] Spider Robot Simulator: 4 koraki")
Kazalo:
- Avtor John Day day@howwhatproduce.com.
- Public 2024-01-30 12:07.
- Nazadnje spremenjeno 2025-01-23 15:09.


Če se vam zdi moj dizajn zanimiv, bi lahko dali majhno donacijo:
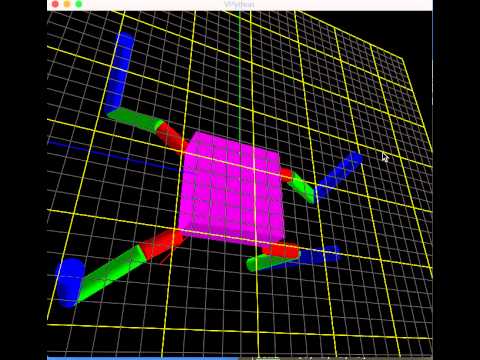
Za simulacijo dejanj mojega robota Spider uporabljam vPython. To bo enostavno razvilo lastne interese v pc/mac in nato preklopilo na arduino.
Če vas zanima pravi robot, ga lahko poučite
www.instructables.com/id/DIY-Spider-RobotQu…
VPython je programski jezik Python in grafični modul 3D, imenovan "vizualni", ki ga je ustvaril David Scherer leta 2000. VPython olajša ustvarjanje navigacijskih 3D zaslonov in animacij, tudi za tiste z omejenimi izkušnjami s programiranjem. Ker temelji na Pythonu, lahko veliko ponudi tudi izkušenim programerjem in raziskovalcem.
1. korak: Namestite VPython in urejevalnik


namestite python , Predlagam uporabo 2.7.x
www.python.org/
in nato vpython
vpython.org/
in moj najljubši urednik - PyCharm
www.jetbrains.com/pycharm/
2. korak: Prenesite kodo in zaženite

Prenesite kodo in jo odprite s programom PyCharm, zaženite kodo in na zaslonu boste videli domišljijskega robota 3D pajka, z miško s srednjim gumbom pa lahko povečate/pomanjšate, desni gumb za vrtenje.
3. korak: V ta simulator razvijte svoja dejanja
Zabavno bo, če lahko razvijete zanimivejše akcije in jih delite z mano.
4. korak: Daljinski upravljalnik do pravega robota pajka
Kaj pa, če bi pravega robota nadzorovali s pomočjo python mislečega bluetootha? Morda boste že poskusili to pot. Pošljem kasneje, če kdo rabi.
Priporočena:
SIMULATOR IGRE DIY RACING -- F1 SIMULATOR: 5 korakov

DIY RACING GAME SIMULATOR || F1 SIMULATOR: Pozdravljeni vsi, dobrodošli na mojem kanalu, danes vam bom pokazal, kako sestavljam " Racing Game Simulator " s pomočjo Arduino UNO. to ni blog za izdelavo, ampak samo pregled in preizkus simulatorja. Celoten blog o izdelavi bo kmalu
Kako priključiti oddajnik FlySky na kateri koli računalniški simulator (ClearView RC simulator) -- Brez kabla: 6 korakov
 -- Brez kabla: 6 korakov")
Kako priključiti oddajnik FlySky na kateri koli računalniški simulator (ClearView RC simulator) || Brez kabla: Vodnik za povezavo FlySky I6 z računalnikom za simulacijo letenja za začetnike krilnih letal. Povezava za simulacijo letenja z uporabo Flysky I6 in Arduina ne zahteva uporabe simulacijskih kablov
[DIY] Spider Robot (štirikotni robot, štirinožni): 14 korakov (s slikami)
![[DIY] Spider Robot (štirikotni robot, štirinožni): 14 korakov (s slikami)](https://i.howwhatproduce.com/images/001/image-1641-34-j.webp "[DIY] Spider Robot (štirikotni robot, štirinožni): 14 korakov (s slikami)")
[DIY] Spider Robot (Quad Robot, Quadruped): Če potrebujete dodatno podporo od mene, bi bilo bolje, da mi daste kakšno primerno donacijo: http: //paypal.me/RegisHsu2019-10-10 posodobitev: Novi prevajalnik povzroči težave pri izračunu plavajočega števila. Kodo sem že spremenil. 2017-03-26
ARDUINO SPIDER ROBOT (ČETVIRNO): 7 korakov
: 7 korakov")
ARDUINO SPIDER ROBOT (ČETVRTEK): Hej fantje! Tukaj je nova vadnica, ki vas bo vodila korak za korakom pri ustvarjanju tovrstnih super neverjetnih elektronskih projektov, ki so " robot za pasek " znan tudi kot " Spider Robot " ou "štirinožni robot". Ker vsako telo ne
[DIY] Robot Spider - II. DEL - Daljinski upravljalnik: 5 korakov
![[DIY] Robot Spider - II. DEL - Daljinski upravljalnik: 5 korakov](https://i.howwhatproduce.com/images/003/image-8661-16-j.webp "[DIY] Robot Spider - II. DEL - Daljinski upravljalnik: 5 korakov")
[DIY] Spider Robot - II. DEL - Daljinski upravljalnik: Če se vam zdi moj dizajn zanimiv, bi lahko dali majhno donacijo: http: //paypal.me/RegisHsuTa je drugi del mojega projekta robota Spider - kako daljinsko upravljati prek bluetooth. Tukaj je 1. del-https://www.instructables.com/id/DIY-Spider-Ro