: 5 korakov")
Kazalo:
- Avtor John Day day@howwhatproduce.com.
- Public 2024-01-30 12:07.
- Nazadnje spremenjeno 2025-01-23 15:09.


Dobrodošli v novem projektu !!!
Najprej sem si res želel narediti grozljive oči, kot za kostume in noč čarovnic. Obožujem posebne učinke in želel sem se naučiti in zgraditi svoje animatronske oči z arduinom, servomotorji in žogicami za namizni tenis.
Korak 1:
Zberite potrebščine…
2 servo motorja (šel sem z najcenejšim možnim v trgovini Hobby Town)
arduino uno (adafruit)
povezovalne palice (Hobby Town)
2 pol gredi (Hobby Town)
2 žogici za namizni tenis
priključki (Hobby Town)
Glava stiropora (Michaels)
druge razno stvari …
1. korak: 2. korak: slikanje oči


Za korak 2 sem želel nadaljevati in si barvati zrkla, kar sem naredil tudi sam. Da, nekoliko so odmaknjeni, a od daleč izgledajo odlično! Če imate kakršna koli vprašanja o tem, katero barvo sem uporabil, samo komentirajte spodaj in vprašajte:)
Ustvarjanje oči:
Potrebni materiali:
4 majhne tanke čopiče
barve
papirnata brisača
Če želite narediti oči, začnete z dvema žogicama za namizni tenis in jih iskreno le prepolovite z natančnim nožem ali rezalnikom. Nato jih najprej pobarvajte z belo podlago, da skrijete vse pomanjkljivosti. Po tem začnite plasteti, kakšno barvo oči želite doseči. Za mojega sem uporabil zeleno in modro. Moja barvna paleta je bila zelena, modra, bela in črna.
2. korak: 3. korak: Sestavljanje baze


3. korak: Sestavljanje podlage
Potrebni materiali:
akrilne plošče
naključni kos kovine
vijaki
pol gredi
tračna žaga (ni potrebna)
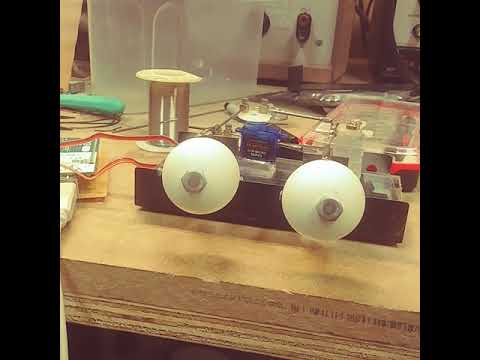
Najprej sem iz akrilne pločevine izrezal želeno obliko in velikost. Nato sem izrezal kovinske nosilce samo iz odpadnega kosa kovine. Ko sem jih pripeljal tja, kamor sem jih želel, sem izvrtal luknje za vijake in pritrdil nosilce na podlago, kot je prikazano zgoraj na sliki. Za enega od mojih servomotorjev sem moral izrezati majhen pravokotnik, da sem se prepričal, da se prilega tja. To je bilo za zagotovitev, da so bile povezave in vse pravilno poravnane.
3. korak: 4. korak: Namestitev servomotorjev in povezav



4. korak: Namestitev servomotorjev in povezav
Potrebni materiali:
2 servomotorja
povezave
majhni rezani akrilni kvadrati
vijaki
priključki
Za korak 4 sem postavil, kje bo vse potekalo, in ga postavil. Da bi zagotovili, da vse sedi enakomerno in naučeno, sem moral pod enega od servomotorjev postaviti majhne izrezane koščke akrila. Enako količino kosov sem moral dati pod vez, ki povezuje oko s servo. Ko so to vsa mesta in jih prilepite (karkoli je vaša izbira, če se lepi), lahko povežete oči s povezavami in servomotorji. Od blizu je to prikazano zgoraj na sliki 4. Samo stransko opombo pri nameščanju servomotorjev in povezav servo, ki je najbližje očem, je treba dvigniti navzgor, pa tudi povezavo neposredno ob njem. To je zato, ker eden potegne po osi x, drugi pa po osi y. To je največji korak in nekatere stvari bo morda treba spremeniti, tudi ko povežete vse.:)
4. korak: KOD KORAK


Dodajanje kode v arduino !! Zgoraj so slike kode, uporabljene za te oči. Za krmiljenje oči sem dodal krmilno palčko iz krmilnika PS1.
5. korak: 5. korak: glava




Ta korak ni obvezen in traja nekaj časa.
5. korak: Izdelava glave
Potrebni materiali
Glava iz stiropora
natančen nož
pištola za vroče lepilo
Zdaj za ta korak ni obvezen in je potreboval nekaj časa. Verjetno mi je vzelo 2 uri. Na žalost je moj partner v zločinu po naključju opustil projekt in si po tem, ko sem končal, zlomil glavo. Kakorkoli že, za to sem šele ugotovil, kako globoko moram izrezati tako od spodaj kot od zgoraj. Najpomembnejši del so oči, ki potrebujejo dovolj prostora, da se premikajo in krožijo, kot vidite na sliki 5. Akrilna podlaga, ki sem jo izbrala, je štrlela ob strani, kot lahko vidite na fotografiji 6. To lahko pokrijete z ušesnimi ščitniki ali kaj smešnega, kot je lasulja!
Potem TADDAAAAA !!!!!! s tem projektom ste popolnoma končali.
Upam, da vam je všeč in komentirajte spodaj, če imate kakršna koli vprašanja ali karkoli vprašajte:)
Priporočena:
Robotska ročica 3D s koračnimi motorji, ki jih upravlja Bluetooth: 12 korakov

Robotska ročica 3D s koračnimi motorji, ki jih nadzira Bluetooth: V tej vadnici bomo videli, kako narediti 3D robotsko roko, s koračnimi motorji 28byj-48, servo motorjem in 3D natisnjenimi deli. Tiskano vezje, izvorna koda, električni diagram, izvorna koda in veliko informacij so na moji spletni strani
Vibracijski motorji: 5 korakov

Vibracijski motorji: Vibracijski motor je v bistvu motor, ki je nepravilno uravnotežen. Z drugimi besedami, na rotacijsko gred motorja je pritrjena necentrirana teža, ki povzroči nihanje motorja. Količina nihanja se lahko spremeni glede na težo
Edinstven model ure, ki ga poganjajo servo motorji Arduino: 5 korakov

Edinstven model ure, ki ga poganjajo servo motorji Arduino: s tem navodilom vam bom pokazal, kako ustvarite uro z uporabo motorjev Arduino Nano in servo. Če želite to narediti, potrebujete naslednje elemente:
Odvračilni ukrep proti vlomu 'Sam doma'/ Uporabite Attiny13 za vožnjo z motorjem s koračnimi motorji in servo motorjem: 5 korakov

Odvračilni ukrep proti vlomilcem „Sam doma“/ Uporabite Attiny13 za vožnjo s koračnim motorjem in servo motorjem: To je morda eden mojih najbolj čudnih projektov doslej :-) Toda tudi če vas ne zanima, da bi vlomilce zadržali stran, lahko ta projekt uporabite za vse, kar želite potrebujete pogon koračnega motorja ali servo motorja ali celo več enosmernih motorjev z Attiny13. Mo
Rover FPV Rover Robot (z Arduino, ESP8266 in koračnimi motorji): 11 korakov (s slikami)
: 11 korakov (s slikami)")
Rover FPV Rover Robot (z Arduino, ESP8266 in koračnimi motorji): Ta navodila kažejo, kako oblikovati daljinsko vodeni dvokolesni robotski rover prek omrežja wi-fi z uporabo Arduino Uno, povezanega z modulom Wi-Fi ESP8266 in dva koračna motorja. Robota je mogoče upravljati iz navadnih internetnih obrvi